










Ils sont devenus des personnages à part entière des films de science-fiction. Et très bientôt, les robots humanoïdes pourraient aussi être amenés à prendre part de façon non négligeable à notre quotidien. Mais avant de pouvoir devenir nos collaborateurs et compagnons, ces machines à forme humaine doivent en premier lieu s’imprégner de notre environnement, et apprendre à gérer au mieux tous les objets, même les plus fragiles.
Voici de quelle façon.
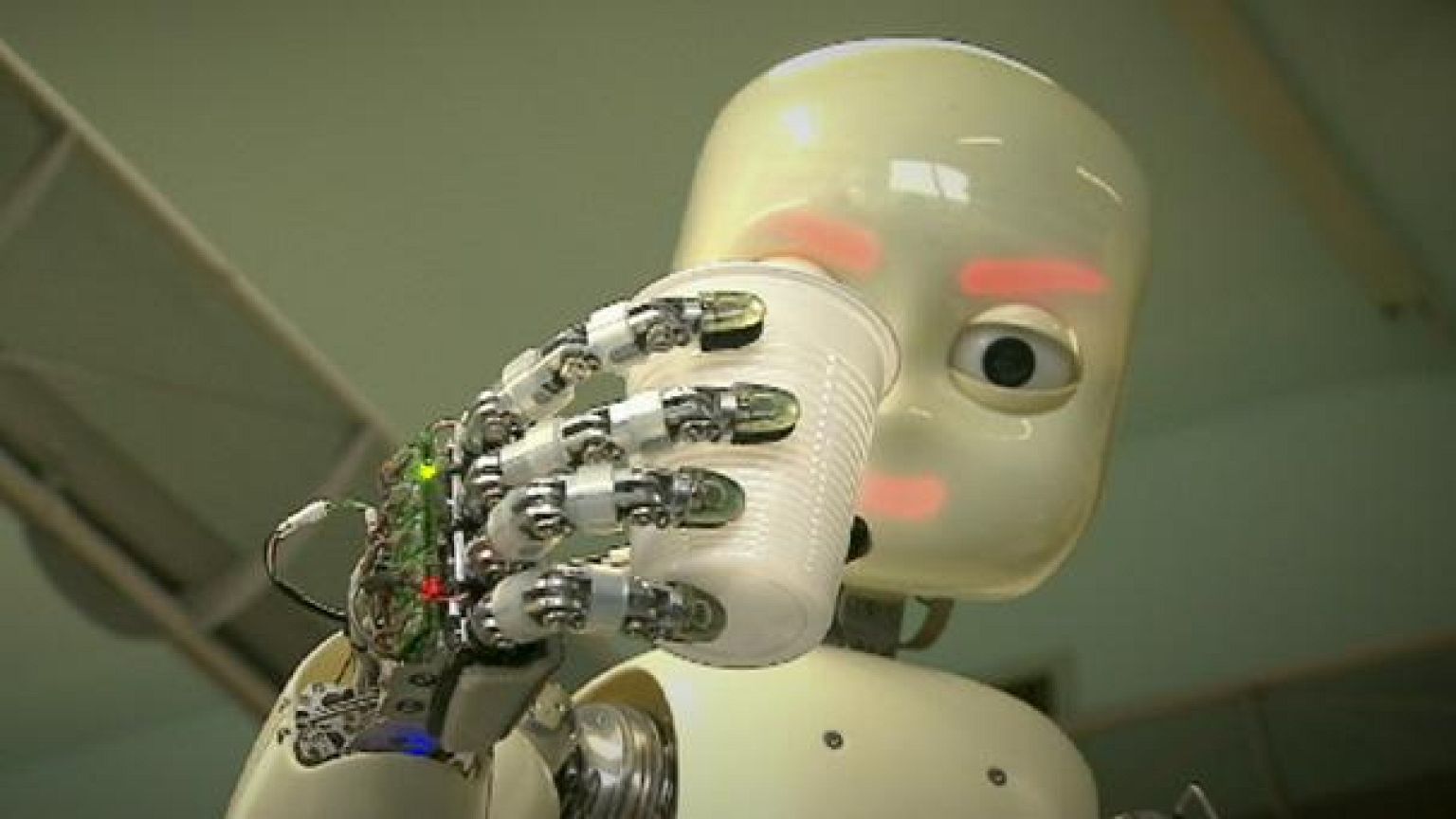
“Voici iCub, un robot humanoïde développé par un consortium européen. Il s’agit là de robot de la taille des enfants qui peut être utilisé pour l‘étude de la cognition. A l’intérieur de ce robot, nous avons mis en place des capteurs tactiles (dans ses paumes et ses doigts). Et nous allons les utiliser au travers de cette expérience : le robot va saisir une tasse très fragile et qui peut facilement être détruite, mais grâce à ce type de capteurs, il va pouvoir la saisir délicatement, raconte Alexander Schmitz, de l’Institut Italien de Technologie de Gênes.”
A l’aide de sa nouvelle peau artificielle, ce robot est capable de contrôler et de modérer les pressions de la main, même si les iCub sont en réalité assez forts pour écraser le gobelet en plastique si nécessaire.
“Les robots sont utilisés depuis longtemps mais uniquement pour des applications industrielles, et sans interaction avec les humains. Désormais, nous estimons qu’il est temps de penser à des robots qui peuvent interagir avec les humains pour différents types de tâches dans lesquelles le rôle des hommes et des robots puisse être de la même importance, dans l’environnement domestique par exemple, ou pour des opérations thérapeutiques. Le développement de la peau des robots est fondamental pour bien mesurer l’interaction entre le robot, l’environnement extérieur et les humains. Il faut donc s’assurer de jouir d’une sécurité maximale lors de l’opération du robot, explique Giorgio Cannata, coordinateur du projet ROBOSKIN.”
Le iCubs, assemblés à l’Institut Italien de Technologie de Gênes, sont également soumis à des tests dans le cadre d’un projet de recherche européen, qui vise à les doter du sens du toucher.
Cela présuppose aussi qu’ils soient en mesure de sentir qu’ils sont touchés. Comment, par exemple, un robot doit-il réagir aux tapes amicales ou hostiles ? Les chercheurs de l’université de Hertfordshire, en Angleterre, ont mis au point un robot plutôt étonnant. Ses réactions sont analysées dans l’espoir de parvenir à un traitement contre l’autisme.
“KASPAR est un robot très peu expressif, de la taille d’un enfant et conçu spécifiquement pour l’interaction homme-robot, mais dans un sens tout particulièrement ludique. Donc, l’idée était de construire un robot avec lequel les gens auraient envie de jouer, de la même façon qu’ils auraient envie de jouer avec un enfant. Par exemple, pour des applications spécifiques dans le traitement de l’autisme, l’idée étant de mettre au point des jeux, de concevoir des scénarios et d’interagir avec les enfants, tout en répondant à certains objectifs thérapeutiques. Comme notamment de permettre aux enfants de choisir la réaction ou l’interaction tactile la plus appropriée. Et c’est le point clé du projet ROBOSKIN, déclare Kerstin Dautenhahn, professeure d’intelligence artificielle à l’Université de Hertfordshire, en Angleterre.”
Les scientifiques estiment que les enfants autistes, et qui ont des difficultés à communiquer avec d’autres personnes, pourraient se sentir plus en sécurité avec une poupée robotisée.
“Nous voulons faire en sorte que KASPAR suscite tel ou tel comportement tactile spécifique chez les enfants. Comme vous l’avez vu, quand un enfant le chatouille, la réaction du robot est positive, mais dans le cas où l’enfant se montre brutal avec le robot, le robot réagit. Cela pourrait le dissuader de recommencer, raconte Ben Robins, chercheur à l’Université de Hertfordshire.”
Des réactions aussi naturelles au contact physique
sont déclenchées par les patchs sensoriels installés sous les vêtements et la peau de KASPAR. Des capteurs souples et flexibles sont raccordés à l’ordinateur qui interprète constamment les différentiels de pression et initie une série de réponses.
“Chacun des patchs dispose de 72 points de détection. Quand on les touche, la pression s’affiche sur l‘écran, comme vous pouvez voir. Si vous appuyez plus fort, l’intensité de la couleur rouge augmente. Si vous levez la main, il n’affiche plus rien, parce qu’il n’y a pas de pression, explique Ze Ji, chercheur associé à l’Université de Hertfordshire.”
Dans quelle mesure un robot socialement acceptable peut imiter l’apparence d’une personne vivante, son comportement et ses sentiments, question à la fois controversée mais qui demeure ouverte.
“Nombreux sont ceux qui prédisent un grand avenir aux robots, et c’est pourquoi il est important que l‘étude de l’interaction de l’homme avec de telles machines se poursuive, car ce que personne ne souhaite, c’est d’avoir de telles machines sur le marché, et que celles-ci n’aient pas été correctement testées au préalable. Ou que les besoins des consommateurs n’aient pas été sondés lors de la conception. Il est donc très important d‘étudier l’interaction homme-robot avant que des millions d’entre eux investissent les habitations des gens ou leur environnement professionnel, explique Kerstin Dautenhahn, de l’Université de Hertfordshire.”
Les nouvelles fonctionnalités de iCub et de KASPAR leur sont fournies par des capteurs tactiles, elles font partie des nombreux outils de détection de pression à l’essai dans le cadre du projet ROBOSKIN.
“Cet appareil fonctionne de la même façon que les écrans tactiles des téléphones portables. La seule différence notable, c’est que nous l’avons transformé en quelque chose de flexible, car il doit pouvoir s’adapter à la surface du robot. Nous avons utilisé un ensemble de capteurs capables de mesurer la pression exercée sur eux, raconte Giorgio Metta, roboticien à
l’Institut Italien de Technologie de Gênes.”
Les mailles de détection triangulaire, mises au point à l’ITI, peuvent être facilement collées sur de larges parties de la surface du robot. Recouverts de mousse de silicone, des capteurs spécifiques mesurent la différence lorsque la fine couche change d‘épaisseur en raison de la pression.
Très utile en soi, la perception du toucher devient encore plus pratique lorsqu’elle est combinée à d’autres sens, comme la vision. Jouer avec une balle implique une coordination des yeux et des mains ; des jeux également accessibles aux robots grâce à une série de capteurs.
“Ce robot se sert des informations sur la couleur et la forme de l’objet, il est donc en mesure d’identifier le ballon et de calculer la position de son centre et sa taille. Grâce à cette information, il détermine alors la distance et dirige la main. Lors de cette expérience, nous utilisons la rétroaction tactile pour déterminer quand et où placer les doigts et saisir la balle. C’est un comportement très simple pour nous, mais c’est très compliqué pour le robot, explique Lorenzo Natale, de l’ITI.”
Il reste encore beaucoup de chemin à parcourir avant que la peau des robots n’en vienne à correspondre à celle, ultra-complexe, dont est dotée son maître, l‘être humain.
Toutefois les technologies actuelles peuvent se targuer de résultats encourageants en matière de toucher.
Et au final, tout cela pourrait contribuer à faciliter l’accès des robots à notre monde en constante évolution.