











Des prototypes, dont un exosquelette de jambes, sont testés en France et en Slovénie pour la rééducation motrice
Les robots pourraient à l’avenir servir à la rééducation des personnes ayant souffert d’une attaque cérébrale. Des scientifiques européens tentent de comprendre le complexe mécanisme de l‘équilibre pour le reproduire sur un exosquelette robotisé.
Victime d’une attaque cérébrale il y a un an et demi, Anton ne remarche que depuis quelques mois. Il a suivi une rééducation motrice classique à l’Institut Universitaire de Rééducation de la République de Slovénie. Depuis quelques semaines, il participe aux tests d’un prototype mis au point par l’unité de recherche du centre.
Retrouver une marche symétrique
L’appareil s’attache au niveau du bassin. Il est équipé de capteurs et de six moteurs qui permettent d’accompagner tous les mouvements du patient et de s’adapter à ses besoins spécifiques. Son concepteur, responsable de l’unité R&D de l’Institut, Zlatko Matjacic explique : “La machine est contrôlée de manière à suivre le mouvement et à ne pas l’influencer quand on veut que ce mouvement soit naturel. D’un autre côté, dans la rééducation suite à une attaque cérébrale, lorsqu’on travaille sur la symétrie de la marche, alors on applique des forces correctives”.
Anton a souffert d’une paralysie côté droit, l’appareil l’encourage à allonger son pas sur ce côté plus faible. Un écran lui permet de suivre en temps réel ses performances, un aspect essentiel pour la motivation. “L’objectif est d’améliorer la démarche qui est toujours anormale et d’améliorer la vitesse et l‘équilibre dynamique qui sont très importants pour bouger dans l’environnement de tous les jours”, précise Nika Goljar, responsable du service de rééducation après AVC.
Comprendre le mécanisme complexe de l‘équilibre
Ce programme s’inscrit dans un projet de recherche européen, Balance, destiné plus largement à comprendre et à résoudre les problèmes d‘équilibre via la robotique. Parmi les autres partenaires du projet, le laboratoire de robotique interactive du CEA-LIST à Gif-sur-Yvette, près de Paris. Ses ingénieurs ont développé un prototype encore plus avancé, un exosquelette robotisé englobant les jambes, du bassin jusqu’aux chevilles. L’enjeu : reproduire le mécanisme complexe de l‘équilibre qui n’existe pas dans les exosquelettes actuels.
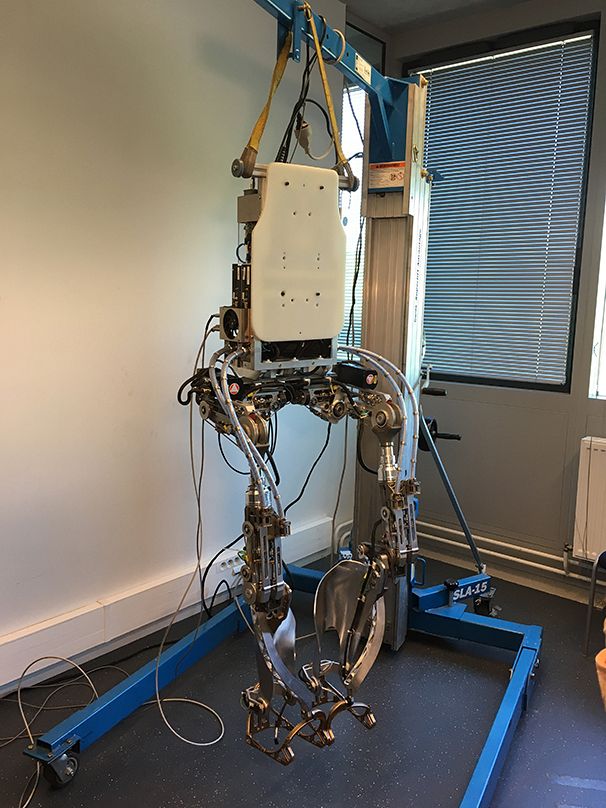 Catherine Bidard est responsable du projet au CEA-LIST. “Cette machine est développée sur une technologie d’actionneurs qui fait qu’on contrôle l’effort et pas simplement la position”, précise t-elle. “L’autre particularité, c’est d’avoir quatre axes motorisés par jambe : ici, vous avez un mouvement latéral de la hanche qui va permettre de rattraper l‘équilibre ou de tourner”.
Catherine Bidard est responsable du projet au CEA-LIST. “Cette machine est développée sur une technologie d’actionneurs qui fait qu’on contrôle l’effort et pas simplement la position”, précise t-elle. “L’autre particularité, c’est d’avoir quatre axes motorisés par jambe : ici, vous avez un mouvement latéral de la hanche qui va permettre de rattraper l‘équilibre ou de tourner”.
Gérer la collaboration entre robot et humain
Garder l‘équilibre avec seulement les deux points d’appui des jambes, le défi est de taille pour les scientifiques. Informaticiens et ingénieurs de plusieurs pays travaillent aux derniers ajustements avant le début des tests sur les humains.
Chercheur au Tecnalia Research & Innovation, Jan Veneman est le coordinateur du projet “Balance”. “Le principal défi est sans doute de savoir comment on gère la collaboration avec l’humain. On ne veut pas que l’exosquelette prenne le contrôle et marche comme un robot, avec un humain dedans. Mais nous voulons que l’exosquelette aide l’humain lorsqu’il en a besoin”, souligne t-il.
D’ici quelques mois, Anton pourrait être parmi les premiers à expérimenter ces jambes robotisées. Mais il faudra encore plusieurs années pour que ces méthodes de rééducation innovantes se généralisent.