










L’archéologie subaquatique est un domaine d‘études riche, mais aussi risqué. Peut-on utiliser des robots en renfort ? A Rummu en Estonie, des
L’archéologie subaquatique est un domaine d‘études riche, mais aussi risqué. Peut-on utiliser des robots en renfort ?
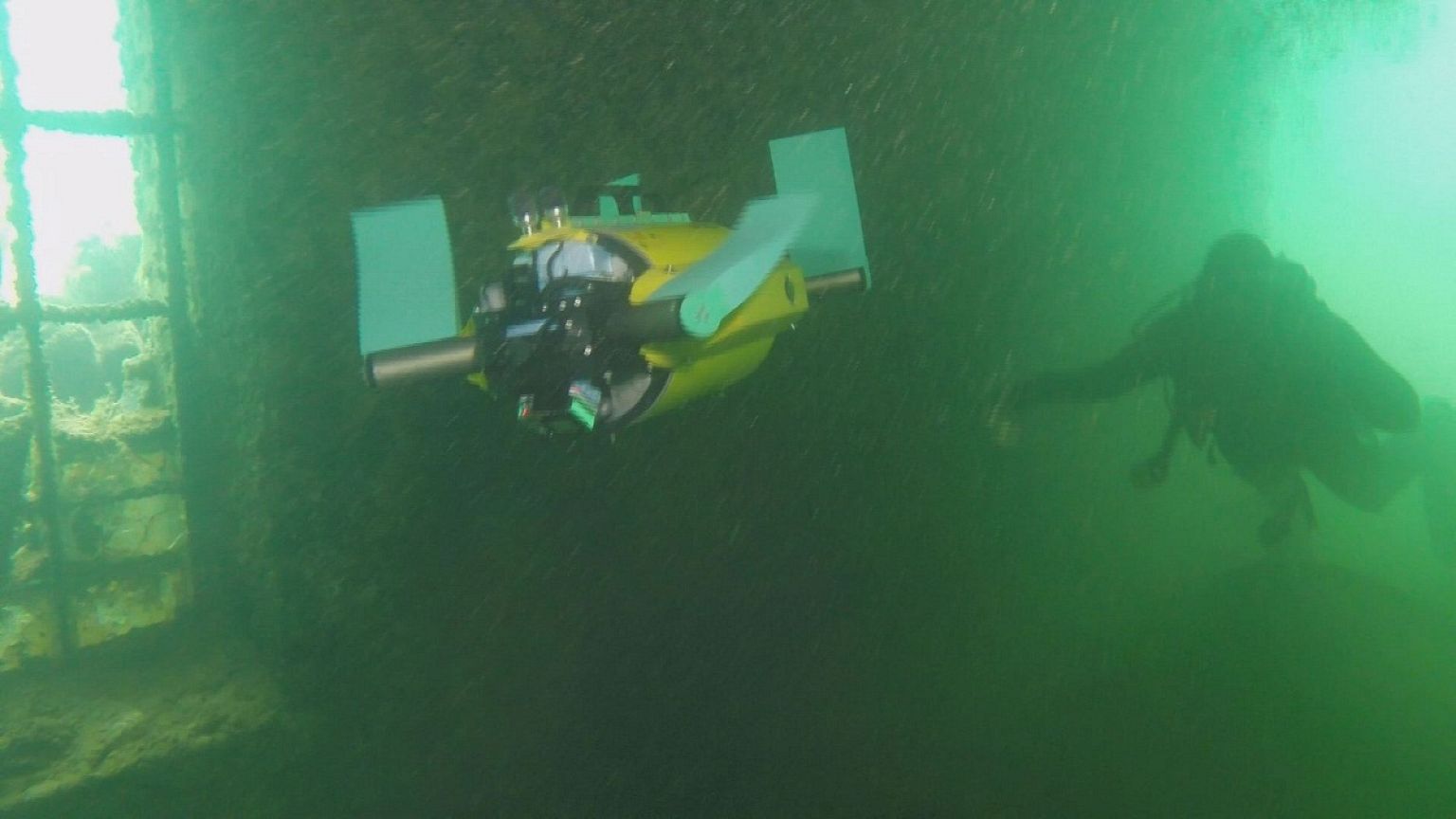
A Rummu en Estonie, des scientifiques en sont persuadés : ils testent un nouvel appareil conçu pour prêter main forte aux archéologues sur des sites immergés. Leur U-CAT peut se rendre sur des épaves ou des vestiges comme dans le cas de ce site, les ruines d’une prison et d’une carrière utilisées du temps des Soviétiques, aujourd’hui enfouies sous les eaux d’un lac.
“Le robot doit aller dans des endroits difficilement accessibles, faire un enregistrement vidéo et revenir, explique Maarja Kruusmaa, professeur de robotique à l’“Université de technologie de Tallinn”:http://www.ttu.ee/en. “Parfois, c’est très exigu, poursuit-elle, donc il est capable de tourner, de pivoter sur tous les axes et d’effectuer le trajet retour.”
Imiter la nature
Mis au point dans le cadre d’un projet de recherche européen intitulé ARROWS, ce U-CAT fonctionne sans télécommande : il suit son programme de manière autonome, guidé par des capteurs. Quant à son mode de déplacement, ses concepteurs ont imité la nature pour le concevoir.
The cute Estonian U-CAT robot is made for underwater archeology: thanks to its flippers, it moves like a sea turtle pic.twitter.com/BXqISFjxRf
— Denis Loctier (@loctier) 17 Juillet 2015
“Plutôt que des hélices, le robot est muni de quatre nageoires, ce qui fait qu’il peut très bien manoeuvrer dans une épave, précise Taavi Salimäe, chercheur en robotique subaquatique au Centre pour la robotique de cette même université de Tallinn. “Les nageoires permettent aussi de soulever moins de sédiments, dit-il, parce que quand on commence à faire tourner une hélice près d’une épave, on soulève toute la boue qui se trouve au fond et on ne voit plus rien.”
Jusqu‘à récemment, seules l’armée et l’industrie comme la production de pétrole en mer pouvaient s’offrir des drones sous-marins. Le prix de cet appareil devrait être beaucoup plus abordable pour les archéologues désireux de réduire les risques dans leurs recherches subaquatiques. “Perdre un robot dans une épave, c’est beaucoup, beaucoup moins grave que de prendre un plongeur, souligne Maarja Kruusmaa. Dans de nombreux cas, on ne rentre pas dans des épaves parce que c’est trop dangereux, c’est clairement une situation dans laquelle on aimerait que les machines puissent remplacer les hommes.”
Comment communiquer sous l’eau ?
Reste des défis à relever pour la robotique subaquatique. Les données vidéo et obtenues par sonar via ces robots peuvent être combinés à des cartes 3D. Ce qui permet d’analyser avec précision, les fonds marins et d’en découvrir plus sur les trésors qui s’y cachent. Mais naviguer et communiquer de manière fiable peut s’avérer délicat. “Quand on fait des études archéologiques, c’est très important de savoir où exactement une photo ou une vidéo a été faite, assure Benedetto Allotta, professeur de robotique à l’Université de Florence et coordinateur du projet ARROWS. Comme c’est impossible de communiquer par radio sous l’eau, on doit recourir à la communication acoustique ; ce n’est pas très fiable, c’est lent et cela pose toutes sortes de problèmes techniques pour communiquer et coopérer avec les robots, ajoute-t-il, donc c’est là-dessus qu’on travaille dans le cadre de ce projet.”
#MARTA #AUV: Mediterranean design, Baltic Trials
ARROWSProject</a> <a href="https://twitter.com/davidemoroni77">davidemoroni77DScaradozzi</a> <a href="http://t.co/vGrK7rkTGE">pic.twitter.com/vGrK7rkTGE</a></p>— Benedetto Allotta (BenAllotta) 21 Juillet 2015
L’archéologie, mais aussi la biologie et la géologie
Avec son équipe, il a élaboré le robot modulaire MARTA. Celui-ci peut être assimilé à un “interprète des mers” : il coordonne le travail simultané de multiples robots de différents types et fonctions. Sa forme allongée et son système de propulsion lui permettent de se déplacer rapidement et de cartographier des zones étendues.
silabcnr</a> 3D reconstruction machines from images taken in Rummu quarry by <a href="https://twitter.com/hashtag/MARTA?src=hash">#MARTA</a> <a href="https://twitter.com/UNI_FIRENZE">UNI_FIRENZEARROWSProject</a> <a href="https://twitter.com/ISSS_HW">ISSS_HW pic.twitter.com/Mqq7a7f0PS— Benedetto Allotta (@BenAllotta) 30 Juillet 2015
“Quand ce projet a été lancé, poursuit Benedetto Allotta, on espérait aider les archéologues dans leurs études ; aujourd’hui, à l’issue de nos recherches, on pense que cette technologie sera bientôt accessible à de nombreux scientifiques travaillant dans des domaines divers comme la biologie ou la géologie.”